
Thursday November 12, 2020 2-5pm
")

Keynote Speaker Maria Yablonina
Meet Maria Yablonina, the Robotics Institute's newest faculty member from the Daniels Faculty of Architecture, Landscape and Design.
")
3-Minute Thesis Competition
In three minutes or less, present your robotics thesis or research paper to a panel of diverse judges. Register by October 23 to compete.
COMPETITION REGISTRATION CLOSED.

3MT Awards Presentation
The 1st Prize Winner will go on to represent the Robotics Institute at the UofT 3MT Finals. Audience will vote for their People's Choice.
Register with your UofT email address by November 11 to get the workshop meeting link.
Keynote: Maria Yablonina
Task- and Site-Specific Robots for Architecture: Smaller Robots = Larger Structures?

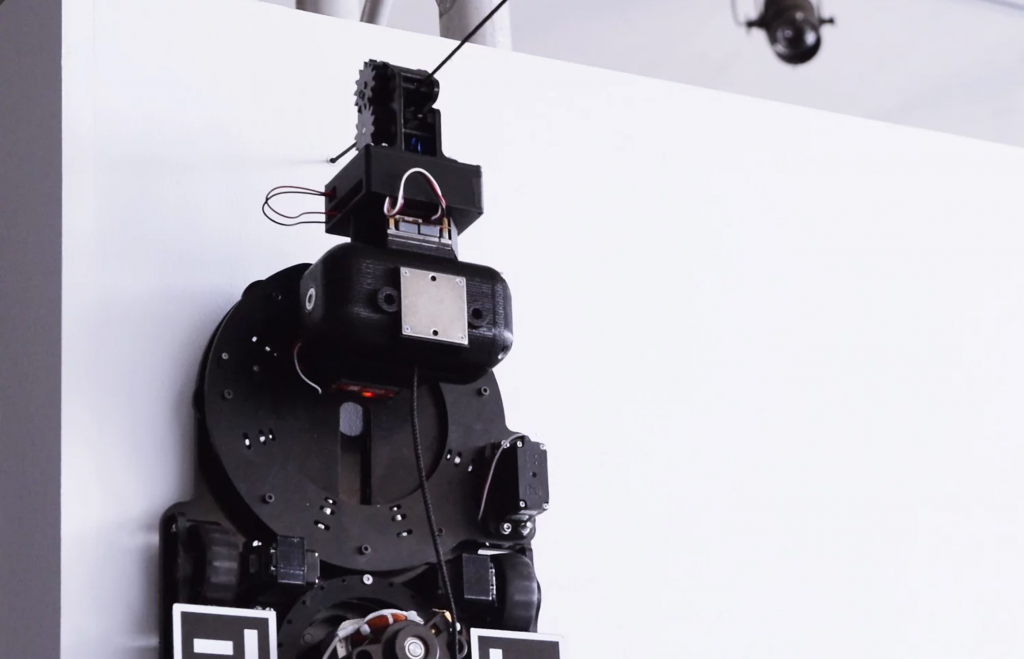
Today the discourse of digital fabrication in the context of architectural research is dominated by the image of an industrial robot arm performing complex movements to produce complex geometry. But what happens when we move beyond appropriation of available hardware towards architecture-specific machines and devices?
Envisioning an entire ecology of machine species designed specifically to manipulate material at an architectural scale opens up a conversation about the role of robotic creatures in architecture beyond construction. A smaller fabrication machine capable of navigating an existing architectural space and safely operating next to a human implies that a fabrication process can be executed on site, and more importantly does not have to be finite, venturing into the topics of adaptive and reconfigurable spaces.
Maria Yablonina is an architect, researcher, and artist working in the field of computational design and digital fabrication at the Daniels Faculty of Architecture, Landscape and Design at the University of Toronto.
Her work lies at the intersection of architecture and robotics, producing spaces and robotic systems that can construct themselves and change in real-time. Such architectural productions include the development of hardware and software solutions, as well as complementing architectural and material systems in order to offer new design spaces.





Three-Minute Thesis Competition
")
It took you months to write your research paper.
Now you've got three minutes.
The Robotics Institute Three Minute Thesis Competition is a fun and informal chance to distill your research and hone your presentations skills for a general audience. You'll develop the skills needed to present complex research information in an engaging, accessible, and compelling way.
")
Eligibililty & Registration
The Robotics Institute 3MT Competition is open to all graduate (Masters and PhD) students and Post Docs who are supervised by University of Toronto Robotics Institute faculty.
You may present your thesis or recent research.
Limited competition spots are available. Interested students must register to compete by October 23, 2020 using the online registration form. REGISTRATION CLOSED.
3MT Presenters
Heat 1







Heat 2







Awards
Three awards will be presented: 1st prize, Runner Up, and People's Choice (voted by the audience). The 1st Prize Winner will be eligible to enter directly into the UofT 3MT Finals.
3MT Awards will be presented at the Workshop closing. The meeting room will stay open after the event for social time.
Rules
We've slightly modified the standard 3MT rules to help prepare Robotics Institute students for upcoming conferences and poster talks:
- Presentations are limited to 3 minutes maximum. Competitors exceeding 3 minutes will be muted when their time is up.
- Presentations may include up to 3 slides, and may include video.
- No additional props are permitted.
- You may present your thesis or other recent research.
Competitors wishing to compete in the UofT 3MT Finals are advised to review the official UofT 3MT Rules, which restrict the number of slides to 1, and do not allow video or animation.
Judges


Judging Criteria
Presentations will be assessed according to the criteria listed below. Please note that each criterion is equally weighted.
Communication
- Did the presenter use language and terminology that was clear and understandable?
- Was the pace of the talk effective?
- Did the presenter use non-verbal communication (i.e., eye contact, voice modulation, body language, etc.) effectively?
- Did the slide(s) enhance, rather than detract from, the talk — were they clear, legible, and concise?
Comprehension
- Did the talk help you to understand the scholarly research and creativity?
- Did the presenter clearly outline the nature and purpose of the scholarly research and creativity?
- Did the presenter clearly indicate what is interesting about the scholarly research and creativity?
- Did the talk follow a logical sequence?
Engagement
- Was the talk engaging?
- Did the talk inspire you to want to know more?
- Did the presenter convey enthusiasm for their work?
- Did the presenter capture and maintain your attention?
How to Prepare
- Watch videos of winning 3MT presentations.
- Learn about common presentation techniques online.
- Practice with your research group.
- Sign up for a Communication Course or Workshop with SGS
- Have fun!
Coaching
Competitors will receive presentation tips at the event from the Communications team at SGS. Post-event coaching is available to competitors.


Workshop Co-Chairs



Hallie Siegel
Managing Director
Strategy & Partnership
It took you months to write your research paper.
Now you've got just 3 minutes.
Are you ready to compete?