
2022 Best Paper Award Results. Chosen from a pool of 262 papers. Read original: http://www.ieee-asme-mechatronics.info/2021-results/
2022 Winner
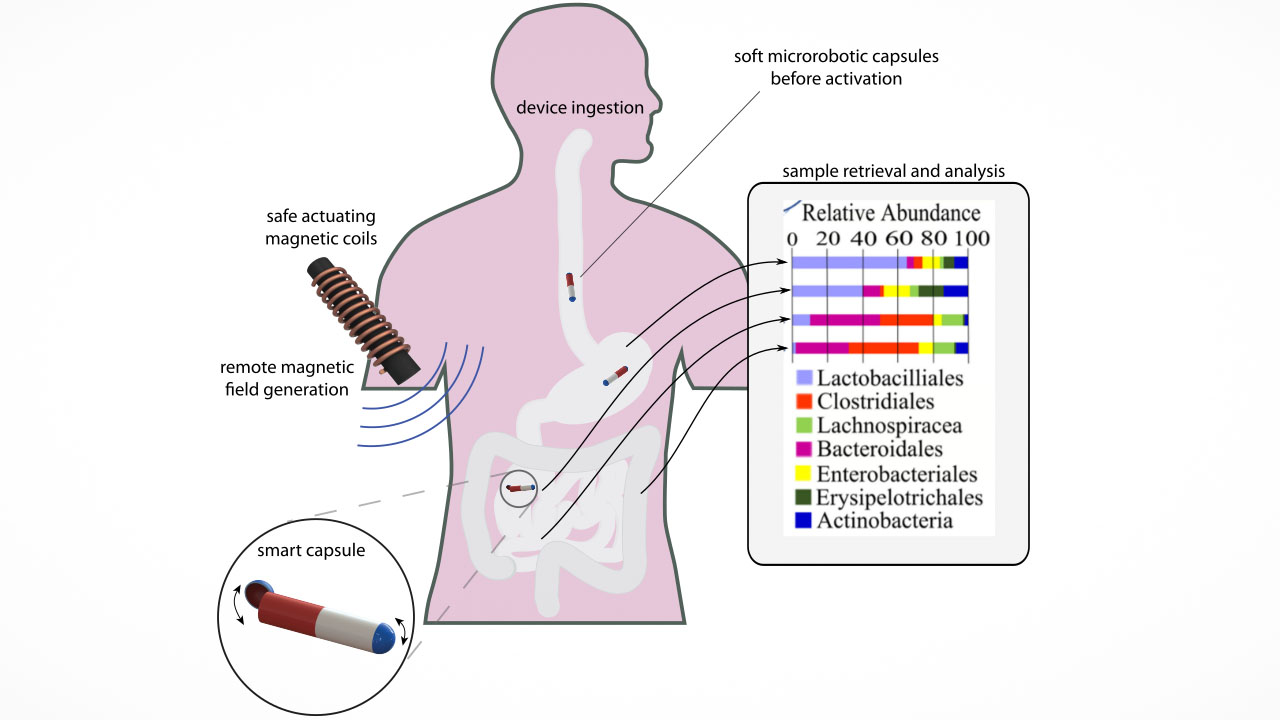
P. Shokrollahi, Y. P. Lai, S. Rash-Ahmadi, V. Stewart, M. Mohammadigheisar, L-A. Huber, N. Matsuura, A. E. H. Zavodni, J. Parkinson, E. Diller : “Blindly Controlled Magnetically Actuated Capsule for Noninvasive Sampling of the Gastrointestinal Microbiome”; IEEE/ASME Transactions on Mechatronics, vol. 26, no. 5, pp. 2616-2628, October 2021, doi: 10.1109/TMECH.2020.3043454.
For the innovative simple design, blind control, and thorough evaluation of a magnetically actuated capsule for microbiome fluid sampling in the gastrointestinal tract.
To read the best paper from 2022 go here.
Finalists
T-A. Le, M.P Bui, J. Yoon, “Optimal Design and Implementation of a Two-Dimensional Electromagnetic Navigation System That Allows Focused Heating of Magnetic Nanoparticles,” in IEEE/ASME Transactions on Mechatronics, vol. 26, no. 1, pp. 551-562, February 2021, doi: 10.1109/TMECH.2020.3041729
Y. Shi, N. Li, C. C. Tremblay, S. Martel, “A Piezoelectric Robotic System for MRI Targeting Assessments of Therapeutics During Dipole Field Navigation,” in IEEE/ASME Transactions on Mechatronics, vol. 26, no. 1, pp. 241-225, February 2021, doi: 10.1109/TMECH.2020.3009829
X. Dong, P. Song, X. Wang, Q. Fan, X. Liu, “Robotic Prototyping of Paper-Based Field-Effect Transistors with Rolled-Up Semiconductor Microtubes,” in IEEE/ASME Transactions on Mechatronics, vol. 26, no. 1, pp. 427-436, February 2021, doi: 10.1109/TMECH.2020.3024996
A. Mitrovic, W.S. Nagel, K. K. Leang, G. M. Clayton, “Closed-Loop Range-Based Control of Dual-Stage Nanopositioning Systems,” in IEEE/ASME Transactions on Mechatronics, vol. 26, no. 3, pp. 1412-1421, June 2021, doi: 10.1109/TMECH.2020.3020047