

PhD student Sven Lilge with a continuum robot
The UofT Robotics Institute brings together professors who work in 14 different areas of robotics at UofT. This is a story about one of the unexpected collaborations that might never have happened without the Robotics Institute.
It all began when Prof Jessica Burgner-Kahrs gave a guest lecture on continuum robotics to an undergrad seminar class taught by Prof Tim Barfoot and Barfoot noticed something striking. He noted that there were significant similarities between the modelling equations that both he and Burgner-Kahrs used. In fact, the equations were almost identical (see Figure 1). This observation caused Barfoot to wonder if it would be possible for Burgner-Kahrs to repurpose the state estimation methods for continuum robotics that he had so successfully developed for mobile robots.
After multiple discussions, Barfoot and Burgner-Kahrs decided that testing Barfoot’s state estimation methods for mobile robots merited further investigation with continuum robots. Burgner-Kahrs chose her most senior PhD student, Sven Lilge, to lead the project. Lilge was not only interested in state estimation/control, but he had already demonstrated a strong mathematical background during his research. Lilge is also an experienced researcher and was excited to take on this project.
What made Barfoot’s observation about the modelling equations so interesting is that Burgner-Kahrs’s continuum robots work in the shape domain, while Barfoot’s mobile robots work in the time domain. And, unlike mobile robots, continuum robots are small with a mechanical structure that is fundamentally different from conventional robots. Their small, jointless bodies form a continuous structure that enables them to traverse confined spaces and manipulate objects in complex, closed environments such as minimally invasive surgery, and non-destructive repair and maintenance of complex machinery like aircraft turbines. When describing them, Burgner-Kahrs enthuses: “Think about what continuum robots can do that is not possible with serial robot arms, mobile robots, or humanoid robots!”
However, one of the big challenges for continuum robot research is that when a continuum robot is working in a confined space, it has not been possible to determine exactly where each part of the robot is located. This limitation creates problems for using continuum robots in some of the situations for which they are most suited, like surgery.
Generally, the shape of a continuum robot has been predicted with kinematic or static models that use physical and mechanical laws. The problem is that these models take time to compute and can suffer from inaccuracies. Consequently, there has been a need for an approach with computationally efficient algorithms that can fuse simpler models with additional sensor readings for greater speed and accuracy.
Lilge and the team discovered that using Barfoot’s state estimation method meets the need for both speed and accuracy in what Lilge describes as “an elegant way, because it is universally applicable to most types of continuum robots and offers fast computation times.” Barfoot’s state estimation methods can be used to calculate the location of every part of the continuum robot – wherever it is in three-dimensional space. Further, the method also describes how confident the calculation is.
What makes the state estimation approach so fast and efficient is that it is set up as a single problem in which the whole state of the system can be solved in one batch, i.e. the whole shape of the continuum robot. Only generic assumptions are made with the model, which means the method can be applied to any type of continuum robot equipped with a few sensors.
The advantages of the state estimation approach are an important step in the right direction for continuum robots. Lilge posits that eventually the state estimation method will bring continuum robots closer to their envisioned applications, such as minimally invasive surgery or in-situ inspection and repair.
What began as a side project for Lilge not only had a positive effect on his research, it became part of his PhD dissertation.
Interested in knowing more details? Read the paper by Lilge, Barfoot, and Burgner-Kahrs published in The International Journal of Robotics Research October 2022
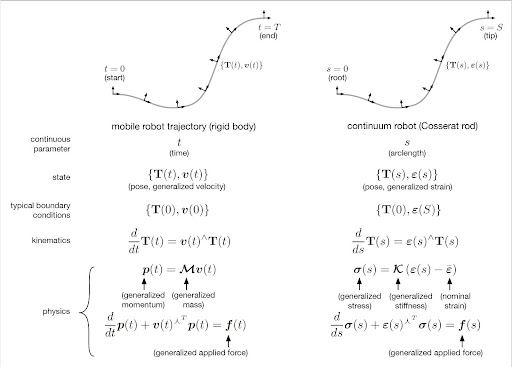
Figure 1 shows the equation that inspired Prof Tim Barfoot to wonder about using his state estimation methods for continuum robots. The figure describes (1) the motion of a mobile robot (time) and (2) the shape of a continuum robot (length/arc). Both sets of equations exhibit a very similar, almost identical, form, and express the orientation and position with respect to either time or length.